I2C (Inter-Integrated Circuit) và SPI (Serial Peripheral Interface) là hai giao thức nối tiếp được sử dụng rộng rãi trong các hệ thống nhúng để giao tiếp giữa các vi điều khiển và các thiết bị ngoại vi khác nhau. Bài viết này sẽ cung cấp một cái nhìn tổng quan chi tiết về cả hai giao thức, khám phá nguyên tắc hoạt động, ưu điểm, nhược điểm và các cân nhắc triển khai của chúng. Chúng ta cũng sẽ xem xét các trường hợp sử dụng thực tế và cung cấp các ví dụ về mã để giúp bạn bắt đầu.
Tổng quan về giao thức I2C
Giao thức I2C (Inter-Integrated Circuit), còn được gọi là IIC hoặc hai dây, là một giao thức giao tiếp nối tiếp được sử dụng rộng rãi trong các hệ thống nhúng. Nó được thiết kế để cho phép giao tiếp giữa nhiều mạch tích hợp (IC) trên một bus duy nhất, do đó giảm số lượng chân cần thiết và đơn giản hóa thiết kế phần cứng. Mục đích chính của I2C là cung cấp một phương pháp giao tiếp đơn giản và hiệu quả chi phí cho các thiết bị tầm ngắn trong một hệ thống.
Các tính năng chính của I2C bao gồm kiến trúc hai dây sử dụng hai đường dây hai chiều: SDA (Serial Data) và SCL (Serial Clock). Đường SDA được sử dụng để truyền dữ liệu, trong khi đường SCL được sử dụng để đồng bộ hóa việc truyền dữ liệu giữa các thiết bị. Giao thức I2C hỗ trợ nhiều thiết bị trên cùng một bus, với mỗi thiết bị có một địa chỉ duy nhất. Điều này cho phép một master device giao tiếp với một slave device cụ thể trên bus.
Cấu trúc liên kết bus I2C bao gồm một hoặc nhiều master devices và một hoặc nhiều slave devices được kết nối song song với hai đường SDA và SCL. Master device khởi tạo giao tiếp và tạo xung nhịp, trong khi slave devices phản hồi các yêu cầu của master. Cả SDA và SCL đều là các đường mở-drain (open-drain), có nghĩa là các thiết bị chỉ có thể kéo các đường này xuống mức thấp. Điện trở kéo lên được sử dụng để kéo các đường lên mức cao khi không có thiết bị nào đang chủ động kéo chúng xuống.
Trong giao tiếp I2C, master device khởi tạo một truyền bằng cách phát ra một điều kiện start trên bus. Điều kiện start được xác định bằng một chuyển đổi từ mức cao xuống mức thấp trên đường SDA trong khi đường SCL ở mức cao. Sau điều kiện start, master device gửi địa chỉ của slave device mà nó muốn giao tiếp. Địa chỉ này được theo sau bởi một bit đọc/ghi, cho biết liệu master device có muốn đọc dữ liệu từ slave device hay ghi dữ liệu vào slave device.
Slave device phản hồi địa chỉ bằng cách gửi một bit xác nhận (ACK) nếu địa chỉ của nó khớp với địa chỉ được gửi bởi master device. Nếu slave device không xác nhận địa chỉ, master device có thể dừng truyền bằng cách phát ra một điều kiện stop. Điều kiện stop được xác định bằng một chuyển đổi từ mức thấp lên mức cao trên đường SDA trong khi đường SCL ở mức cao.
Nếu slave device xác nhận địa chỉ, master device có thể bắt đầu truyền dữ liệu. Dữ liệu được truyền theo các byte, với mỗi byte được theo sau bởi một bit ACK từ bên nhận. Master device có thể đọc dữ liệu từ slave device hoặc ghi dữ liệu vào slave device, tùy thuộc vào bit đọc/ghi đã được gửi trong giai đoạn địa chỉ.
Giao thức I2C cung cấp một số lợi ích, bao gồm yêu cầu chân thấp (chỉ hai dây), hỗ trợ nhiều thiết bị trên cùng một bus và một cơ chế xác nhận để đảm bảo việc truyền dữ liệu đáng tin cậy. Tuy nhiên, I2C cũng có một số hạn chế, chẳng hạn như tốc độ dữ liệu tương đối chậm so với các giao thức khác như SPI.
Tổng quan về giao thức SPI
Tổng quan về giao thức SPI
Giao thức Giao diện Ngoại vi Nối tiếp (SPI) là một giao thức giao tiếp nối tiếp đồng bộ thường được sử dụng trong các hệ thống nhúng để giao tiếp tầm ngắn, tốc độ cao giữa bộ vi điều khiển và các thiết bị ngoại vi. Không giống như I2C, chỉ sử dụng hai đường truyền dữ liệu, SPI sử dụng bốn đường, mang lại tính linh hoạt và tốc độ cao hơn.
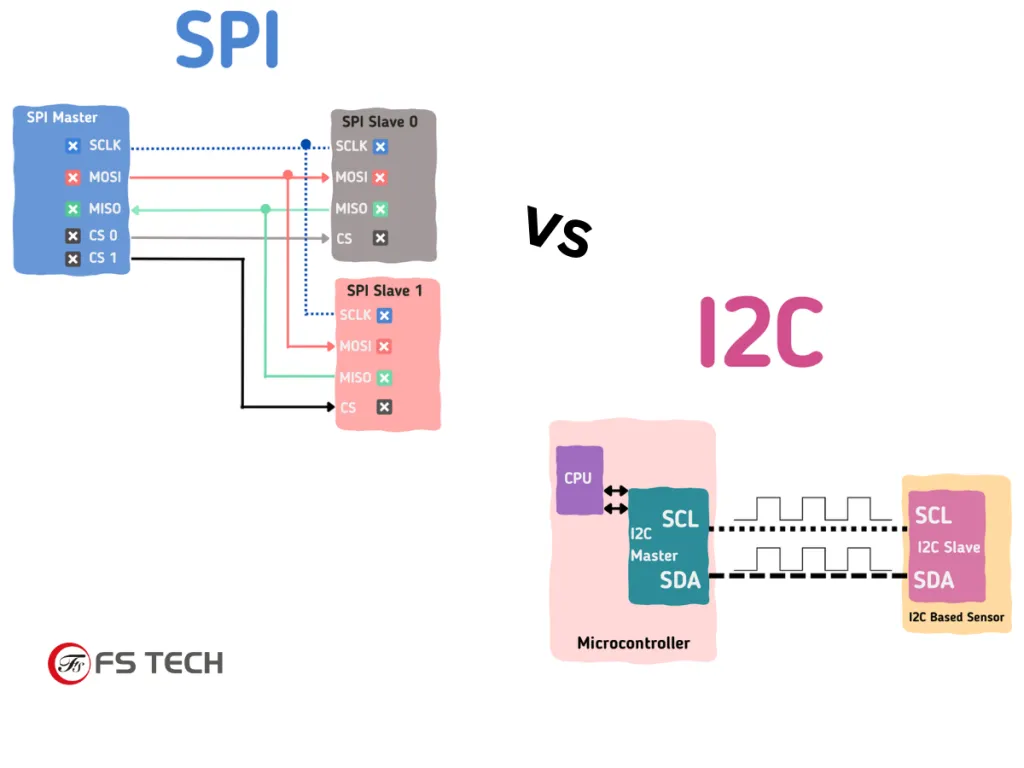
Kiến trúc bus SPI bao gồm bốn đường chính:
* MOSI (Master Out Slave In): Đường này được sử dụng bởi thiết bị chủ để gửi dữ liệu đến thiết bị slave.
* MISO (Master In Slave Out): Đường này được sử dụng bởi thiết bị slave để gửi dữ liệu đến thiết bị chủ.
* SCLK (Serial Clock): Tín hiệu xung nhịp này được tạo ra bởi thiết bị chủ để đồng bộ hóa việc truyền dữ liệu giữa thiết bị chủ và thiết bị slave.
* SS/CS (Slave Select/Chip Select): Đường này được sử dụng bởi thiết bị chủ để chọn một thiết bị slave cụ thể để giao tiếp. Thông thường, đường này ở mức cao và được đưa xuống mức thấp để chọn slave.
Trong giao tiếp SPI, một thiết bị hoạt động với vai trò là thiết bị chủ, điều khiển giao tiếp và các thiết bị khác hoạt động với vai trò là thiết bị slave, phản hồi các yêu cầu từ thiết bị chủ. Thiết bị chủ khởi tạo giao tiếp và điều khiển tín hiệu xung nhịp, trong khi thiết bị slave đơn giản chỉ đáp ứng các lệnh từ thiết bị chủ. Nhiều thiết bị slave có thể được kết nối với một bus SPI duy nhất, nhưng chỉ một thiết bị slave có thể hoạt động tại một thời điểm.
Quá trình giao tiếp SPI bắt đầu với việc thiết bị chủ khẳng định đường chọn slave (SS/CS) cho thiết bị slave cụ thể mà nó muốn giao tiếp. Sau khi chọn slave, thiết bị chủ bắt đầu tạo tín hiệu xung nhịp trên đường SCLK. Dữ liệu được truyền đồng thời trên cả đường MOSI và MISO. Thiết bị chủ xuất dữ liệu trên đường MOSI và thiết bị slave xuất dữ liệu trên đường MISO. Dữ liệu thường được chuyển theo đơn vị byte (8 bit) và có thể được truyền theo thứ tự bit quan trọng nhất trước (MSB) hoặc bit quan trọng ít nhất trước (LSB), tùy thuộc vào cấu hình. Việc truyền dữ liệu tiếp tục cho đến khi tất cả dữ liệu cần thiết được trao đổi. Cuối cùng, thiết bị chủ hủy khẳng định đường chọn slave, báo hiệu sự kết thúc của giao tiếp.
Một trong những ưu điểm chính của SPI là tốc độ dữ liệu cao. Bởi vì SPI sử dụng giao tiếp song công toàn phần, dữ liệu có thể được truyền và nhận đồng thời, dẫn đến tốc độ truyền nhanh hơn. Ngoài ra, SPI rất linh hoạt và có thể được cấu hình để hỗ trợ nhiều chế độ giao tiếp khác nhau, cho phép nó được sử dụng với nhiều loại thiết bị ngoại vi.
Tuy nhiên, SPI cũng có một số hạn chế. Một trong những hạn chế lớn nhất là yêu cầu số lượng chân cao hơn so với I2C. Do SPI sử dụng bốn đường, nó cần nhiều chân hơn trên bộ vi điều khiển và thiết bị ngoại vi. Điều này có thể là một vấn đề trong các ứng dụng mà các chân rất khan hiếm. Ngoài ra, SPI không hỗ trợ xác nhận, nghĩa là không có cách nào để thiết bị chủ biết liệu dữ liệu được truyền có được nhận chính xác hay không. Cuối cùng, khoảng cách giao tiếp của SPI bị giới hạn bởi tốc độ của tín hiệu và chất lượng của các đường kết nối. Nói chung, SPI được sử dụng cho giao tiếp tầm ngắn trong một PCB duy nhất.
So sánh I2C và SPI
So sánh I2C và SPI
Cả I2C và SPI đều là các giao thức nối tiếp được sử dụng rộng rãi trong hệ thống nhúng, nhưng chúng đáp ứng các nhu cầu khác nhau và có các đặc điểm riêng biệt. Việc hiểu rõ sự khác biệt giữa chúng là rất quan trọng để chọn giao thức phù hợp cho một ứng dụng cụ thể.
Một trong những khác biệt chính là tốc độ. SPI thường nhanh hơn I2C. SPI có thể đạt tốc độ truyền dữ liệu cao hơn đáng kể vì nó sử dụng cấu trúc liên kết đơn giản hơn và không yêu cầu địa chỉ hoặc xác nhận phức tạp. Mặt khác, I2C bị giới hạn về tốc độ do thiết kế hai dây và nhu cầu về bit bắt đầu và dừng, địa chỉ thiết bị và bit xác nhận.
Số lượng chân là một khía cạnh quan trọng khác để xem xét. I2C chỉ yêu cầu hai dây (SDA và SCL) để giao tiếp, giúp nó lý tưởng cho các ứng dụng mà số lượng chân là yếu tố hạn chế. Ngược lại, SPI thường cần bốn dây (MOSI, MISO, SCLK và SS/CS) cho mỗi thiết bị slave. Mặc dù SPI yêu cầu nhiều chân hơn, nhưng nó cho phép giao tiếp song công toàn phần, có nghĩa là dữ liệu có thể được truyền và nhận đồng thời. I2C chỉ hỗ trợ giao tiếp bán song công.
Khoảng cách giao tiếp cũng là một yếu tố quan trọng. I2C thường phù hợp hơn cho giao tiếp ngắn khoảng cách trên cùng một bảng mạch. SPI cũng thường được sử dụng cho giao tiếp ngắn khoảng cách, nhưng nó có thể được sử dụng ở khoảng cách xa hơn với các kỹ thuật và mạch điện thích hợp.
Cả I2C và SPI đều hỗ trợ nhiều thiết bị, nhưng chúng thực hiện theo những cách khác nhau. I2C sử dụng sơ đồ địa chỉ, trong đó mỗi thiết bị trên bus được gán một địa chỉ duy nhất. Điều này cho phép nhiều thiết bị giao tiếp trên cùng một hai dây. SPI thường sử dụng một dòng chọn slave riêng biệt (SS/CS) cho mỗi thiết bị slave. Điều này có nghĩa là master có thể giao tiếp với một slave cụ thể bằng cách khẳng định dòng chọn slave tương ứng của nó.
Về độ phức tạp, I2C thường phức tạp hơn SPI. I2C yêu cầu địa chỉ thiết bị, bit xác nhận và xử lý các điều kiện xung đột. SPI đơn giản hơn về mặt giao thức, nhưng nó có thể yêu cầu phần cứng phức tạp hơn để chọn slave, đặc biệt là khi số lượng thiết bị slave lớn.
Dưới đây là một bảng tóm tắt các đặc điểm chính của I2C và SPI:
| Đặc điểm | I2C | SPI |
|---|---|---|
| Tốc độ | Thấp hơn | Cao hơn |
| Số lượng chân | Thấp hơn | Cao hơn |
| Khoảng cách giao tiếp | Ngắn | Ngắn đến trung bình |
| Hỗ trợ nhiều thiết bị | Có (địa chỉ) | Có (chọn slave) |
| Độ phức tạp | Phức tạp hơn | Đơn giản hơn |
| Chế độ giao tiếp | Bán song công | Song công toàn phần |
Các trường hợp sử dụng của I2C và SPI khác nhau tùy thuộc vào yêu cầu cụ thể của ứng dụng. I2C phù hợp với các ứng dụng yêu cầu số lượng chân thấp và hỗ trợ nhiều thiết bị, chẳng hạn như giao tiếp với các cảm biến, EEPROM và màn hình nhỏ. SPI phù hợp với các ứng dụng yêu cầu tốc độ dữ liệu cao và giao tiếp song công toàn phần, chẳng hạn như giao tiếp với thẻ nhớ, màn hình LCD và cảm biến tốc độ cao.
Triển khai I2C và SPI trong hệ thống nhúng
Triển khai I2C và SPI trong hệ thống nhúng đòi hỏi sự hiểu biết vững chắc về cả phần cứng và phần mềm. Về mặt phần cứng, trước tiên cần đảm bảo rằng vi điều khiển bạn chọn có các ngoại vi I2C và SPI. Hầu hết các vi điều khiển hiện đại đều có nhiều ngoại vi này, cho phép giao tiếp với nhiều thiết bị. Điều quan trọng là phải kiểm tra bảng dữ liệu của vi điều khiển để xác định các chân cụ thể được chỉ định cho I2C (SDA và SCL) và SPI (MOSI, MISO, SCK, SS/CS). Việc kết nối vật lý các thiết bị I2C và SPI với vi điều khiển phải tuân theo sơ đồ nối dây thích hợp. Đối với I2C, đây thường là vấn đề kết nối SDA và SCL của thiết bị với các chân tương ứng trên vi điều khiển, bao gồm cả việc sử dụng điện trở kéo lên trên cả hai đường dây này. Đối với SPI, nó liên quan đến việc kết nối MOSI, MISO và SCK, đồng thời đảm bảo rằng chân chọn slave (SS) hoặc chip select (CS) được định cấu hình và điều khiển chính xác.
Về mặt phần mềm, việc giao tiếp với các thiết bị I2C và SPI thường được thực hiện thông qua các thư viện dành riêng cho vi điều khiển hoặc bằng cách thao tác trực tiếp các thanh ghi ngoại vi. Sử dụng C/C++ để giao tiếp với các thiết bị I2C thường liên quan đến việc sử dụng các chức năng để khởi tạo ngoại vi I2C, chỉ định địa chỉ của thiết bị slave, viết dữ liệu vào thiết bị và đọc dữ liệu từ thiết bị. Ví dụ: trên một nền tảng cụ thể, một chức năng như `I2C_Write(address, data)` có thể được sử dụng để gửi dữ liệu đến một thiết bị I2C có địa chỉ nhất định. Tương tự, `I2C_Read(address, buffer, length)` có thể được sử dụng để đọc một số byte từ một thiết bị I2C vào một bộ đệm.
Đối với SPI, quy trình cũng tương tự. Ngoại vi SPI phải được khởi tạo với các cài đặt phù hợp, chẳng hạn như tốc độ xung nhịp, cực tính và pha. Sau đó, dữ liệu có thể được truyền bằng cách sử dụng các hàm như `SPI_Transmit(data)` và `SPI_Receive()`. Quan trọng là quản lý chân chọn slave (SS) một cách chính xác để chọn thiết bị SPI nào đang được giao tiếp. Điều này thường bao gồm việc đặt chân SS ở mức thấp trước khi truyền và đặt chân SS ở mức cao sau khi truyền.
Xử lý lỗi là rất quan trọng trong giao tiếp I2C và SPI. Các lỗi có thể xảy ra do nhiều lý do, chẳng hạn như thiết bị không phản hồi, hỏng dữ liệu hoặc xung đột bus. Các kỹ thuật xử lý lỗi bao gồm kiểm tra các mã trạng thái sau mỗi hoạt động giao tiếp, triển khai thời gian chờ để ngăn chặn các hoạt động bị treo và sử dụng kiểm tra chẵn lẻ hoặc mã kiểm tra dự phòng theo chu kỳ (CRC) để phát hiện lỗi dữ liệu. Gỡ lỗi có thể được hỗ trợ bằng cách sử dụng bộ phân tích logic hoặc dao động ký để xem các tín hiệu I2C và SPI, hoặc bằng cách sử dụng trình gỡ lỗi để bước qua mã và kiểm tra các giá trị của biến.
Để tối ưu hóa hiệu suất giao tiếp I2C và SPI, một số mẹo có thể được sử dụng. Thứ nhất, hãy sử dụng tốc độ xung nhịp cao nhất có thể mà các thiết bị được kết nối hỗ trợ. Thứ hai, giảm thiểu số lượng hoạt động bắt đầu và dừng trên bus I2C bằng cách sử dụng hoạt động đọc hoặc ghi kết hợp, nếu được hỗ trợ. Thứ ba, sử dụng Truyền trực tiếp bộ nhớ (DMA) để truyền dữ liệu, vì điều này cho phép vi điều khiển thực hiện các tác vụ khác trong khi quá trình truyền dữ liệu diễn ra. Thứ tư, xem xét việc sử dụng các ngắt để xử lý các sự kiện giao tiếp, vì điều này có thể làm giảm độ trễ.
Các ứng dụng thực tế của I2C và SPI
Các ứng dụng thực tế của I2C và SPI:
Giao thức I2C và SPI là những trụ cột trong thế giới hệ thống nhúng, hỗ trợ vô số ứng dụng trong nhiều ngành công nghiệp khác nhau. Tính linh hoạt và sự đơn giản của chúng khiến chúng trở nên lý tưởng để giao tiếp với nhiều loại thiết bị ngoại vi. Hãy cùng khám phá một số ứng dụng thực tế nơi I2C và SPI tỏa sáng:
Cảm biến:
I2C đặc biệt phù hợp để giao tiếp với các cảm biến. Nhiều cảm biến, chẳng hạn như cảm biến nhiệt độ, cảm biến áp suất, cảm biến độ ẩm và gia tốc kế, đều sử dụng I2C để truyền dữ liệu đến bộ vi điều khiển. Ví dụ, trong hệ thống giám sát môi trường, một vi điều khiển có thể sử dụng I2C để đọc dữ liệu nhiệt độ và độ ẩm từ các cảm biến tương ứng, cho phép theo dõi và điều khiển chính xác các điều kiện môi trường.
Bộ nhớ:
Cả I2C và SPI đều được sử dụng để giao tiếp với các thiết bị bộ nhớ như EEPROM và Flash. EEPROM thường được sử dụng để lưu trữ các thông số cấu hình hoặc dữ liệu hiệu chuẩn trong hệ thống nhúng, trong khi bộ nhớ Flash cung cấp khả năng lưu trữ không bay hơi lớn hơn cho nhật ký dữ liệu, chương trình cơ cơ sở hoặc các loại dữ liệu khác. SPI thường được ưu tiên cho bộ nhớ Flash do tốc độ truyền dữ liệu cao hơn so với I2C.
Hiển thị:
I2C thường được sử dụng để điều khiển các màn hình nhỏ, chẳng hạn như màn hình LCD hoặc OLED, đặc biệt là trong các ứng dụng mà số chân hạn chế là một mối quan tâm. Nhiều mô-đun hiển thị có giao diện I2C, đơn giản hóa quá trình tích hợp vào hệ thống nhúng. SPI cũng được sử dụng cho màn hình, đặc biệt là khi cần tốc độ làm mới nhanh hơn hoặc độ phân giải cao hơn.
Các thiết bị ngoại vi khác:
Ngoài các ứng dụng này, I2C và SPI được sử dụng để giao tiếp với nhiều loại thiết bị ngoại vi khác, bao gồm bộ ghép kênh analog-số (ADC), bộ ghép kênh kỹ thuật số-analog (DAC), chip đồng hồ thời gian thực (RTC) và mô-đun giao tiếp không dây. Ví dụ, một hệ thống thu thập dữ liệu có thể sử dụng I2C để giao tiếp với ADC để số hóa tín hiệu analog và SPI để lưu trữ dữ liệu trong bộ nhớ Flash để phân tích thêm.
Ứng dụng cụ thể trong ngành:
Ô tô: I2C và SPI được sử dụng rộng rãi trong các hệ thống ô tô để giao tiếp giữa các bộ vi điều khiển khác nhau, cảm biến và bộ truyền động. Ví dụ, I2C được sử dụng để giao tiếp với các cảm biến như cảm biến tốc độ bánh xe, cảm biến góc lái và cảm biến nhiệt độ động cơ, trong khi SPI được sử dụng để giao tiếp với các thiết bị như bộ điều khiển ABS, hệ thống túi khí và hệ thống quản lý động cơ.
Hàng không vũ trụ: Trong hàng không vũ trụ, I2C và SPI được sử dụng trong các hệ thống quan trọng như hệ thống điều khiển bay, hệ thống điều hướng và hệ thống liên lạc. Những giao thức này cho phép giao tiếp đáng tin cậy giữa các cảm biến khác nhau, bộ xử lý và bộ truyền động, đảm bảo an toàn và hiệu suất của máy bay.
Y tế: I2C và SPI tìm thấy các ứng dụng trong các thiết bị y tế như máy theo dõi bệnh nhân, máy bơm truyền dịch và thiết bị chẩn đoán. Chúng được sử dụng để giao tiếp với các cảm biến như cảm biến nhịp tim, cảm biến oxy và cảm biến áp suất, cũng như để điều khiển bộ truyền động và hiển thị.
Điện tử tiêu dùng: I2C và SPI có mặt ở khắp nơi trong điện tử tiêu dùng, cung cấp kết nối cho vô số thiết bị. Từ điện thoại thông minh và máy tính bảng đến TV và máy chơi game, những giao thức này cho phép giao tiếp liền mạch giữa các thành phần khác nhau, cho phép thực hiện các chức năng khác nhau.
Ví dụ: Một điện thoại thông minh có thể sử dụng I2C để giao tiếp với cảm biến máy ảnh, cảm biến tiệm cận và cảm biến gia tốc, trong khi SPI có thể được sử dụng để giao tiếp với chip Wi-Fi và chip Bluetooth.
Tổng kết
I2C và SPI là các giao thức nối tiếp quan trọng cho giao tiếp trong các hệ thống nhúng. I2C cung cấp một giải pháp đơn giản và hiệu quả để giao tiếp với nhiều thiết bị sử dụng chỉ hai dây, trong khi SPI cung cấp tốc độ dữ liệu cao hơn và tính linh hoạt. Hiểu các ưu điểm và nhược điểm của mỗi giao thức là rất quan trọng để chọn giao thức phù hợp cho một ứng dụng cụ thể. Bằng cách làm theo hướng dẫn này, bạn có thể tự tin triển khai giao tiếp I2C và SPI trong các dự án hệ thống nhúng của mình.